Background &
Objective
The automation of repetitive household chores represents a natural evolution in robotics. Dishwashing, one of the most monotonous domestic tasks, demands precision, consistency, and adaptability, qualities that industrial robotic arms are well suited to replicate. This project harnesses the ABB IRB 120, a compact yet highly capable 6-DOF industrial manipulator, to simulate an intelligent plate-cleaning system entirely within a virtual MATLAB environment.
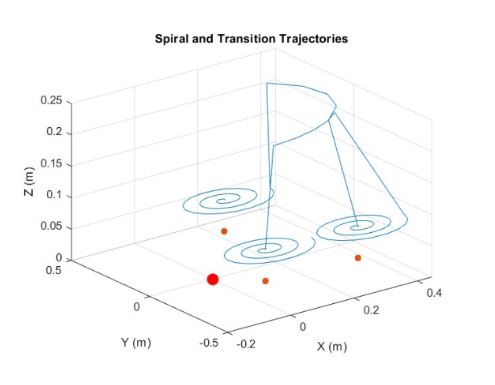
Unlike conventional dishwashers that rely on pressurized water jets, this robotic system applies targeted motion intelligence mimicking the deliberate, circular scrubbing patterns of human dishwashing. Using numerical inverse kinematics and a Proportional-Derivative (PD) controller, the arm computes precise joint configurations for every point along a spiral cleaning trajectory, ensuring complete surface coverage of each plate. Plates are placed at random positions within a safety-bounded workspace, and the robot navigates between them using smooth cubic polynomial transition paths.
The entire simulation was developed and validated using MATLAB Live Script, which combines executable code, real-time 3D visualizations, and analytical derivations in a single interactive document. The system successfully demonstrated collision-free multi-plate cleaning in simulation laying the groundwork for a future physical deployment.
The plate cleaning robot is designed to perform precise dishwashing tasks using an ABB IRB 120 robotic arm. The system relies on numerical inverse kinematics, a Proportional Derivative (PD) controller, spiral trajectory generation, and smooth transition planning between plates. Here's how it all comes together. Techniques used in this implementation: 1. Workspace Definition and Plate Position Generation 2. Inverse Kinematics and Control 3. Spiral Cleaning Trajectory 4. PD Controller for Joint Motion 5. Transition Trajectory Between Plates
- Year2025
- RoleSolo Project · Full Implementation
- RobotABB IRB 120 · 6-DOF Industrial Arm
- SoftwareMATLAB · MATLAB Live Script
- ControlPD Controller · Numerical IK
- OutputSimulated Spiral Cleaning Paths
- InstituteNMAM Institute of Technology, NITTE