Background &
Objective
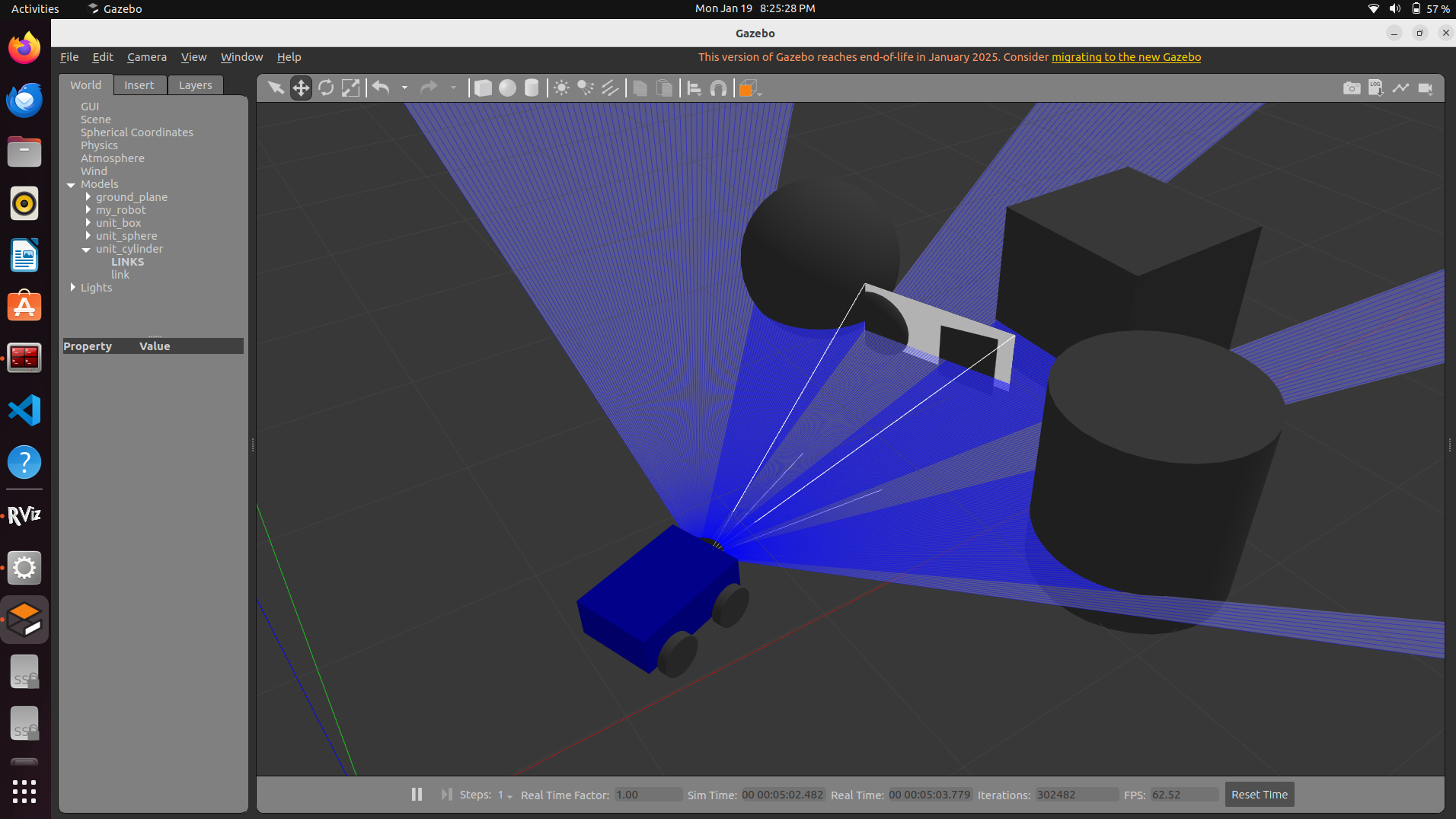
This project is a ROS 2 4-wheel-drive mobile robot simulated end-to-end in Gazebo and visualized in RViz. The robot integrates LiDAR and RGB camera sensors and supports full teleoperation, serving as a complete baseline for mobile robot perception, motion, and system bringup which is built using a modular ROS 2 package architecture rather than a single monolithic node.
The project is structured around four core focus areas:
- ROS 2 modular architecture using separate description and bringup packages, keeping the robot's URDF/Xacro definitions decoupled from its simulation launch logic.
- Sensor integration with LiDAR and camera Gazebo plugins, publishing real-time topics for downstream perception tasks.
- Differential drive kinematics for realistic wheel-based motion across all four wheels.
- Simulation-first validation using Gazebo physics and RViz visualization before any hardware deployment.
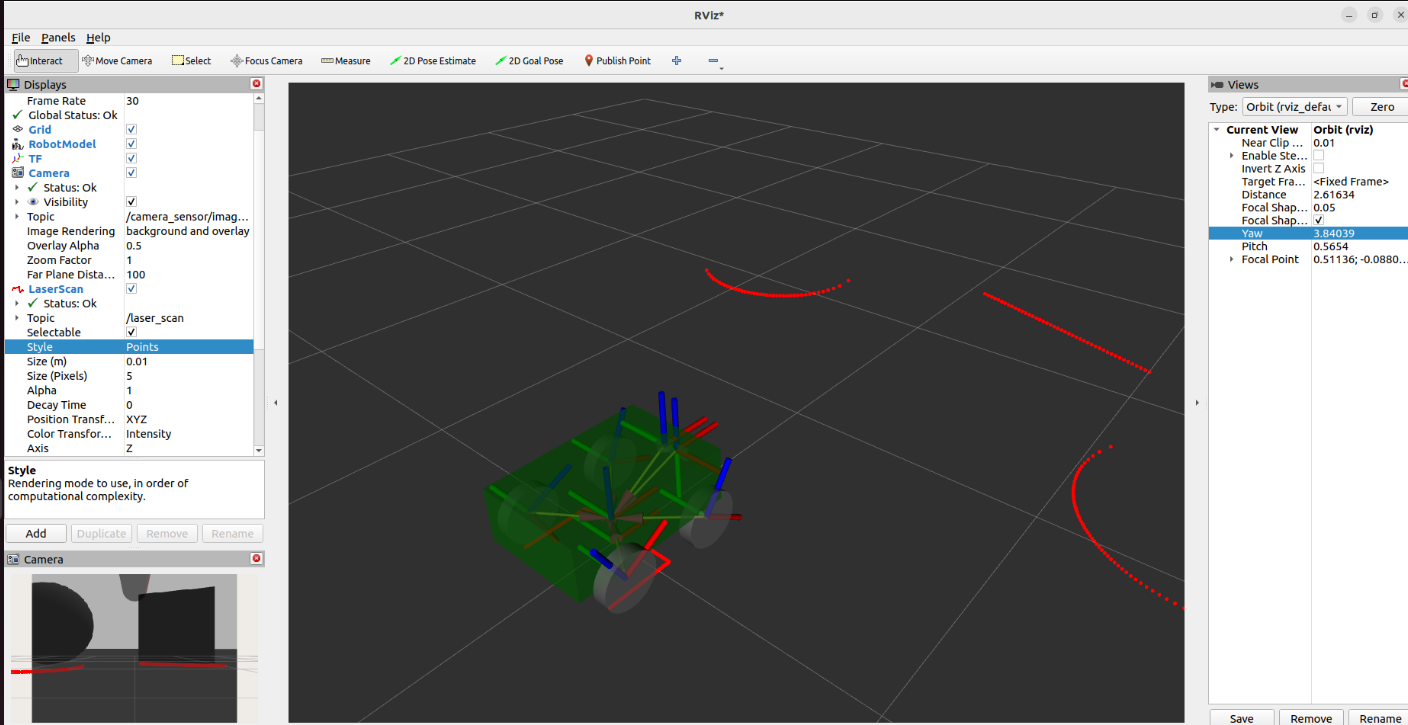
The robot's URDF/Xacro files define its structure, wheels, sensor mounts, and coordinate frames, while ROS 2 launch files handle spawning the robot into the Gazebo world along with its controllers and sensor plugins. The LiDAR publishes live scan data on /laser_scan, and the RGB camera streams image data for vision-based tasks. In RViz, the full TF tree, robot model, laser scan, and sensor data are visualized simultaneously, while keyboard teleoperation drives the robot in real time via /cmd_vel velocity commands which gives a complete simulation-to-visualization-to-control loop for mobile robot development.
Project Highlights
- Year2026
- RoleSolo · Design, Build, Simulate
- OSUbuntu 22.04
- FrameworkROS 2 Humble
- SimulatorGazebo 11 + RViz2
- StatusSimulation Complete